Index
Enumerations
Classes
Type aliases
Functions
Type aliases
Channel
Options
Type declaration
Optional address?: number
The address of the Sabertooth. Default is 128.
Optional baud
Rate?: number Serial baud rate, options are 2400, 9600, 19200, 38400 and 115200. Default is 38400.
Optional debug?: boolean
Flag to enable debug console.log messages. Default is false.
Optional max
Get Attempt Count?: number The number of times to attempt a get request. Default is 3.
Optional max
Motor Output Rate?: number Maximum motor output as proportion of battery input, in range [0, 1]. Default is 0.95 (95%). Set to 1 to disable maximum output rate compensation.
The actual output motor voltage for a given input drive rate is non-linear above approximately a 95% drive rate; the output motor voltage is capped at approximately 95% of the battery voltage (see image below).
When
maxMotorOutputRateis set to a value < 1, a given drive rate is adjusted by scaling it withrate * maxMotorOutputRate. This provides for a linear relationship between the input drive rate and the actual motor output voltage.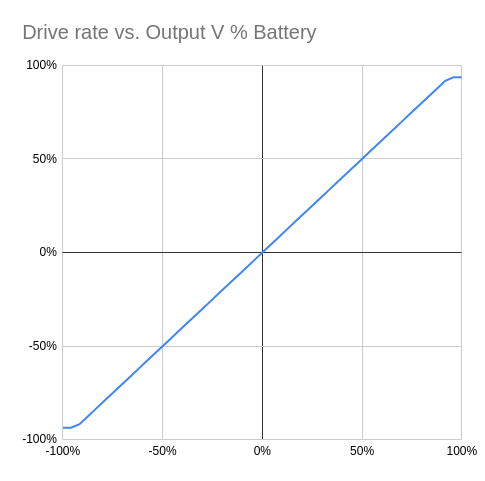
Optional motor
Current Denoise Alpha?: number Motor current denoise exponential moving average factor. Range is (0, 1]. Larger value means less de-noising. Set to 1 to disable denoising. Default is 0.1.
Optional timeout?: number
The timeout for get requests, in ms. Default is 1000. 0 indicates timeout is disabled.
Single
Functions
Const list
Get a list of the avilable Sabertooth devices. The return is an array of objects with fields like:
manufacturer: 'Dimension Engineering',
serialNumber: '1600DB368EC8',
pnpId: 'usb-Dimension_Engineering_Sabertooth_2x32_1600DB368EC8-if01',
locationId: undefined,
vendorId: '268b',
productId: '0201',
path: '/dev/ttyACM0'Returns Promise<PortInfo[]>
Sabertooth USB connection options.